





Actualmente, en el ámbito de las ciencias de la actividad física y el deporte crea cierta controversia la expresión «sistema sensoriomotor», la cual ha sido mal llamada y simplificada frecuentemente con el término de «propiocepción». Este complejo sistema incorpora todos los componentes aferentes, el proceso de integración y procesamiento central y las respuestas eferentes, con el objetivo de mantener la estabilidad funcional de la articulación durante los movimientos del cuerpo. La presente revisión tiene como principal objetivo esclarecer los conceptos relacionados con el sistema sensoriomotor y entender así su importancia en el entrenamiento, la prevención y la readaptación a la competición deportiva.
In the field of physical activity and sports science, some controversy has currently been created by the term “sensorimotor”’ system, frequently simplified in error to the term of “proprioceptive system”. Incorporating all of the sensory (afferent), motor (efferent), and central integration and processing components, this system serves to maintain functional joint stability during body movements. The main objective of this review is to clarify the concepts related to the sensorimotor system and understand their importance in sports training, injury prevention and return-to-play.
Actualmente sabemos que la participación en deportes conlleva un riesgo de sufrir lesiones, las cuales pueden, en muchos casos, inhabilitar para la práctica deportiva1. De forma particular, algunas lesiones deportivas severas como las rupturas de ligamento cruzado anterior y otras más habituales como los esguinces de tobillo, se asocian frecuentemente a un aumento de la morbilidad (por ejemplo, artrosis prematura) y discapacidad a largo plazo2, 3.
Las lesiones deportivas tienen una causa multifactorial. La clasificación más conocida es la que divide los factores de riesgo en intrínsecos y extrínsecos1, aunque también hay varios autores que los clasifican en 4 categorías: ambiental, anatómica, hormonal y neuromuscular4. En la presente revisión bibliográfica nos centraremos en nuestro motivo principal de estudio, el factor neuromuscular, que como factor intrínseco es uno de los más modificables con el entrenamiento. Para poder incidir en la prevención de estos factores de riesgo neuromuscular debemos integrarlos dentro del amplio sistema sensoriomotor. La bibliografía científica actual asocia un mayor riesgo de lesiones deportivas a déficits en el sistema sensoriomotor como son la alteración de los patrones de movimiento5, 6, una inadecuada stiffness muscular7, déficits en el control postural8, alteraciones del sistema propioceptivo9, déficits en la activación muscular del tronco10 y déficits en los mecanismos de anticipación11.
El correcto funcionamiento de este complejo sistema sensoriomotor será prioritario en la prevención y readaptación de las lesiones deportivas. La lesión del tejido articular viene ligada a una alteración de los mecanorreceptores, lo que causará una alteración de las aferencias que protegerán la articulación. Este hecho puede alterar el control neuromuscular normal y, como consecuencia, producir una disminución en la estabilidad de la articulación12. Este proceso se relaciona con el círculo vicioso lesivo (Figura 1).
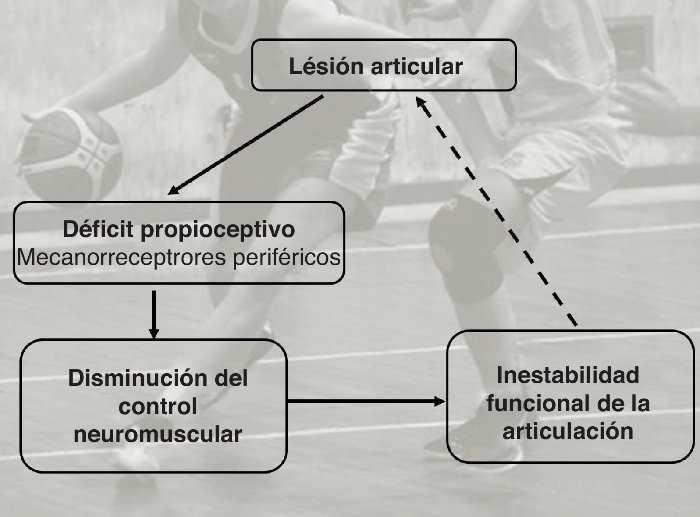
Figura 1. Círculo vicioso lesivo. Fuente: Fort A 34 . Adaptada de Lephart SM y Fu FH 12 .
La bibliografía científica más reciente muestra cómo varios déficits en el sistema sensoriomotor pueden mejorar a través de diferentes tipos de entrenamiento neuromuscular, ejemplos son la mejora del equilibrio y los patrones de activación muscular13, 14. Además, cabe destacar que diferentes tipos de entrenamiento, descritos por la bibliografía como neuromuscular/propioceptivo, han mostrado evidencia de su eficacia en la reducción de la incidencia lesiva en adolescentes y jóvenes que participan en deportes donde predominan los cambios de dirección15, 16, 17. Parece ser que el entrenamiento neuromuscular óptimo es específico para cada grupo de población. Para poder optimizar la eficacia de este tipo de entrenamiento será básico entender el funcionamiento del complejo sistema sensoriomotor.
El propósito principal del presente estudio es describir conceptos básicos relacionados con las bases fisiológicas y anatómicas del sistema sensoriomotor, y así entender los mecanismos responsables del mantenimiento de la estabilidad funcional de la articulación durante las actividades deportivas.
El sistema sensoriomotorLa expresión «sistema sensoriomotor» se presenta como la combinación de los procesos neurosensorial y neuromuscular, la cual ha sido mal llamada y simplificada frecuentemente con el término de «propiocepción». Una de las obras más representativas en el ámbito que nos ocupa es la escrita en el año 2000 por Scott Lephart, titulada Proprioception and neuromuscular control in joint stability, y en la que explica cómo se adoptó la expresión sistema sensoriomotor para poder describir los siguientes componentes: receptores periféricos, integración y procesamiento central y respuesta motora. Todos ellos están implicados en el mantenimiento de la homeostasis articular durante los movimientos corporales (estabilidad funcional de la articulación)12 (Figura 2).
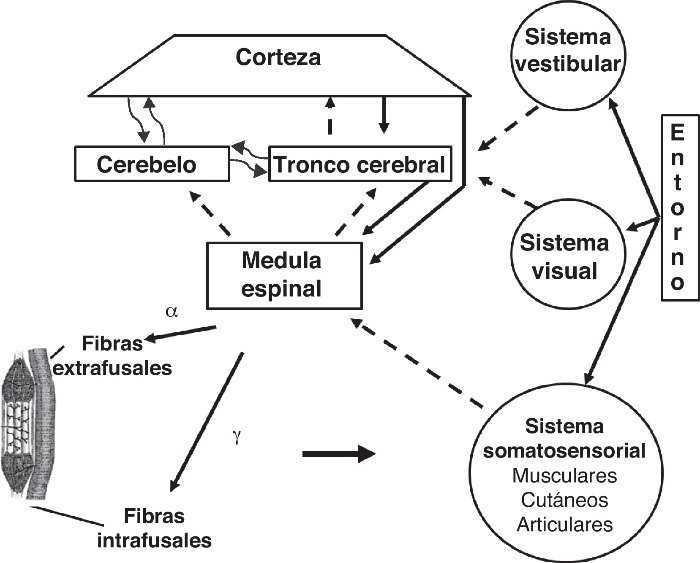
Figura 2. El sistema sensoriomotor. Fuente: Fort A 34 . Adaptada de Riemann BL y Lephart SM 21,33 . El sistema sensoriomotor incorpora todos los componentes aferentes, el proceso de integración y procesamiento cental y las respuestas eferentes, con el objetivo de mantener la estabilidad funcional de la articulación. Aunque el sistema visual y vestibular contribuyen, los mecanorreceptores periféricos son los más importantes desde la perspectiva del entrenamiento deportivo. Los mecanorreceptores se encuentran en diferentes partes del cuerpo, incluyendo la piel, las articulaciones, los ligamentos, los tendones y los músculos. Las vías aferentes (líneas de puntos) transmiten entradas a 3 niveles de control motor y se asocian a áreas como el cerebelo. La activación de las neuronas motoras puede darse en respuesta directa a la entrada sensorial perifénca (reflejos) o bien descendiendo desde centros superiores (movimiento automático y voluntario). Estas 2 vías pueden ser moduladas o reguladas por las áreas asociadas (líneas onduladas). Desde cada uno de los niveles de control motor (líneas continuas negras) las vías eferentes convergen con las motoneuronas gamma y alfa situadas en las raíces ventrales de la médula espinal. La activación de las fibras musculares intrafusales y extrafusales provocará nuevos estímulos para ser presentados a los mecanorreceptores periféricos.
Tradicionalmente se consideraba la estabilidad articular como una propiedad que dependía exclusivamente de las estructuras ligamentosas. Actualmente sabemos que la estabilidad articular es considerada como la función sinérgica en la que los huesos, articulaciones, cápsulas, ligamentos, músculos, tendones, receptores sensoriales y vías neurales espinales y corticales actúan en armonía para garantizar la homeostasis articular. La estabilidad articular depende de estructuras viscoelásticas pasivas (ligamentos) y de órganos viscoelásticos activos (músculos)18 (Figura 3). Los efectos de protección de dicho componente pasivo se deben a la puesta en tensión de estas estructuras, así como a la configuración geométrica y cinemática de la articulación a través de su rango de movimiento. Por otra parte, el componente activo puede ejercer su rol protector tanto de forma pasiva (tono muscular de reposo) como de forma activa (acción muscular refleja o voluntaria). Las respuestas dinámicas de la musculatura se pueden dar en cualquier punto del rango de movimiento según la variación de parámetros como la velocidad articular, la carga externa, la gravedad y el dolor, entre otros18.
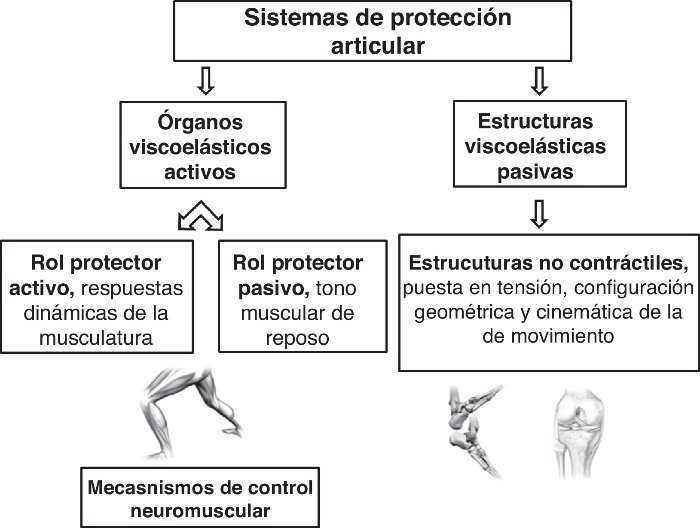
Figura 3. Sistemas de protección articular.
Según lo explicado hasta este punto, es importante diferenciar entre los 3 niveles que participan en la estabilidad dinámica (sinónimo de estabilidad funcional) de la articulación: proceso neurosensorial, proceso de integración y procesamiento central y respuesta neuromuscular.
Proceso neurosensorialEl sistema nervioso central (SNC) obtiene la información necesaria para controlar los movimientos de nuestro cuerpo desde 3 subsistemas: el sistema somatosensorial, el sistema vestibular y el sistema visual12, 19. Desde el punto de vista de la actividad física y el deporte, y a pesar de que las aferencias vestibulares y visuales contribuyen a la integración y decodificación de la información por parte del SNC, los mecanorreceptores periféricos que forman parte del sistema somatosensorial son considerados como uno de los más importantes desde el punto de vista del entrenamiento, la prevención y la readaptación a la competición deportiva. Es por ello que en este texto nos centraremos en este último subsistema.
Sistema somatosensorialEl término somatosensorial (o somatosensación) engloba toda la información mecanorreceptiva (propiocepción), termorreceptiva (tacto y temperatura), dolorosa, lumínica y química derivada de la periferia20. Este sistema contiene receptores cutáneos, óseos, musculares, tendinosos y articulares. Entre los estímulos que más nos interesan, encontramos los de tacto, presión, dolor, posición y movimiento articular. Los receptores que detectan la sensación de posición, movimiento y tensión son los habitualmente denominados propioceptores12, y por lo tanto es importante no confundir el término somatosensorial con el de propiocepción, ya que este último es un subcomponente del primero.
Sistema propioceptivoCharles Scott Sherrington definió por primera vez la propiocepción en el año 1906 como la sensación de posición y movimiento de las extremidades12. Este neurólogo se refería al sistema propioceptivo como la información aferente que llega desde los propioceptores localizados en las articulaciones, tendones y músculos, y que contribuye a la conciencia de las sensaciones musculares, de la postura segmentaria (estabilidad articular) y de la postura global (equilibrio postural) (Lephart SM, 2000). La definición de propiocepción ha creado y crea aún mucha controversia en la comunidad científica. De hecho, es seguramente el término que más confusión crea dentro del sistema sensoriomotor. Se ha utilizado incorrectamente como sinónimo de kinestesia, somatosensación, equilibrio, coordinación y sentido de la posición articular12, 21.
Actualmente se define propiocepción como la capacidad de una articulación para determinar su posición en el espacio, detectar su movimiento (kinestesia) y la sensación de resistencia que actúa sobre ella21. Esta capacidad es adquirida por el estímulo de los mecanorreceptores periféricos, que convertirán este estímulo mecánico en una señal neural que será transmitida por las vías aferentes hasta su procesamiento en el SNC. La propiocepción también es definida como la vía aferente del sistema somatosensorial, y no incluye ni el procesamiento de la señal sensorial por parte del SNC ni la actividad resultante de las vías eferentes que darán lugar a la respuesta motora12.
Otra definición es la de Roberts (2003), que sigue la utilizada por B.D. Wyke9: conciencia de la posición articular (sensación de posición) y conciencia del movimiento en el espacio (kinestesia); y feedback de los mecanorreceptores que ejercen un efecto continuo reflejo e inconsciente sobre el tono muscular y el equilibrio, mediante el circuito de motoneuronas gamma, para mantener la estabilidad dinámica de las articulaciones.
A partir de los diferentes trabajos comentados y del estudio realizado sobre el tema, en el presente artículo definimos propiocepción como el tipo de sensibilidad del sistema somatosensorial que participa en mantener la estabilidad dinámica de la articulación, lo que se consigue mediante la detección de las variaciones de presión, tensión y longitud de los diferentes tejidos articulares y musculares. Según este concepto y el trabajo de Rienman y Lephart (2002), los cuales hablan de la importancia de diferenciar entre la recepción periférica e inconsciente de los estímulos y el proceso mediante el cual estos se hacen conscientes21, debemos tener claro que la propiocepción se refiere únicamente al proceso de detección periférica de los mecanorreceptores. A partir de aquí, y a pesar de la controversia existente en torno a estos conceptos, la estabilidad articular no solo vendrá dada por los receptores periféricos, sino que también participará la integración y el procesamiento central de la información y las vías motoras.
Rol de los mecanorreceptores en el control del sistema neuromuscularTal y como hemos dicho anteriormente, la contribución de las aferencias articulares en el control motor, dentro del cual ya hemos explicado que incluimos la posición y el sentido del movimiento (propiocepción), ha sido y sigue estando bajo debate. Generalmente, los mecanorreceptores se clasifican en 3 grupos: receptores articulares, receptores cutáneos y receptores musculares. En la actualidad se conoce que estos 3 tipos de receptores actúan sobre la propiocepción del aparato locomotor, a pesar de que sus contribuciones relativas se encuentran todavía sin aclarar9.
Cuando estos receptores son estimulados con una intensidad suficiente generan impulsos aferentes que se propagan hasta el SNC. Estas señales aferentes son mediadas a 3 niveles del SNC: la médula espinal, el tronco cerebral y los centros cognitivos (córtex). El SNC procesará estas señales aferentes y generará respuestas motoras (eferentes), que modularán la actividad muscular22.
A continuación describiremos brevemente los diferentes tipos de receptores tomando como modelo la articulación de la rodilla, que es la más investigada en la literatura científica actual.
Receptores articularesSe localizan 4 tipos de receptores en las partes blandas de la articulación de la rodilla. Estos son: terminaciones de Ruffini, corpúsculos de Pacini, receptores de Golgi y terminaciones nerviosas libres9, 12, 22. Los receptores articulares son descritos según el estímulo y las siguientes características12:
- Estado de la articulación (estática, dinámica o ambas) en el que están activos.
- Intensidad del estímulo que determina el umbral de activación (umbral alto o bajo).
- Tipos de adaptación al estímulo: si los receptores siguen activos cuando el estímulo persiste se llaman de adaptación lenta; por otra parte, si desaparecen o disminuyen sus señales tras la presentación del estímulo, se llaman de adaptación rápida.
En la Tabla 1 se describen las principales características de los receptores articulares.
Tabla 1. Receptores articulares
| Tipo de receptor | Localización | Sensible a | Activo cuando la articulación se encuentra | Umbral de activación | Respuesta al estímulo persistente | Proyección |
| Terminaciones Ruffini | Cápsula y ligamento | Posición articular, presión intraarticular, amplitud y velocidad de movimiento | Estática o dinámica | Bajo | Adaptación lenta | Médula espinal, corteza sensorial |
| Corpúsculos de Paccini | Cápsula, ligamento, menisco y cojinete adiposo | Aceleración o desaceleración | Solo dinámica | Bajo | Adaptación rápida | Médula espinal, corteza sensorial |
| Receptores de Golgi | Ligamento y menisco | Tensión ligamentos, esp. al final del rango de movimiento | Solo dinámica | Alto | Adaptación lenta | Médula espinal, corteza sensorial |
| Terminaciones nerviosas libres | Ampliamente distribuidos en cápsula, ligamentos, cojinete adiposo, y menos en el menisco | Dolor de origen mecánico o químico | Inactivo, excepto en presencia de estímulos nocivos (estática y dinámica) | Alto | Adaptación lenta | Médula espinal, corteza sensorial |
Fuente: Solomonow FM y Krogsgaard M 18 ; Williams GM et al. 22 ; Fort A 34 .
Actualmente no hay evidencia que apoye la contribución significativa de los receptores cutáneos sobre la estabilidad dinámica de la articulación de la rodilla, sin embargo, algunos autores sugieren que estos receptores pueden informar sobre la posición y cinestesia (sensación de movimiento) de la articulación cuando la piel es estirada23, 24. Aunque con menos importancia que los receptores articulares, la contribución de los receptores cutáneos sobre la posición de la articulación es sustancialmente inferior a la de los receptores musculares22, 23.
Receptores muscularesExisten principalmente 2 tipos de receptores, el huso neuromuscular y el órgano tendinoso de Golgi (OTG)20. Las señales que provienen de estos tienen como principal finalidad el control de la contracción muscular de forma inconsciente, transmitiendo información a la médula espinal, el cerebelo y la corteza cerebral, ayudando a cada uno de los diferentes segmentos del SNC en su función de control del sistema neuromuscular. Es importante destacar que estos receptores permiten una retroalimentación continua de información sobre el estado muscular en cada instante. Como describiremos a continuación más detalladamente, el huso muscular envía información al SNC sobre el estado y la variación de la longitud del músculo. Por otra parte, el OTG envía información sobre la tensión muscular y la variación de esta20.
El primer receptor que describiremos es el huso muscular. Anatómicamente, cada huso está formado por fibras intrafusales, las cuales están ligadas a las fibras extrafusales. Hay 2 tipos de fibras intrafusales: fibras de bolsa nuclear y fibras en cadena nuclear. En la parte central de estas se encuentra el componente receptor; por otra parte, sus extremos tienen capacidad de contracción. Estos receptores están conectados a 2 tipos de terminaciones sensitivas: terminaciones primarias o tipo Ia (inerva los 2 tipos de fibras intrafusales) y terminaciones secundarias o tipo II(solo inerva las fibras en cadena)20, 25. La estimulación de los receptores del huso neuromuscular puede producir 2 tipos de respuestas: estática, provocada por las terminaciones primarias y secundarias, y dinámica, dada solo por las terminaciones primarias. Respecto a las motoneuronas que inervan el huso, también se pueden dividir en gamma-dinámicas (gamma-d) y gamma-estáticas (gamma-e). La manifestación más simple de la función del huso muscular es el llamado reflejo miotático, el cual, ante un estiramiento repentino del músculo y, por tanto, del huso, provoca una contracción refleja instantánea, muy dinámica y de gran intensidad, de las fibras musculares que le rodean. Con este mismo estímulo se provoca otro tipo de respuesta más mantenida del mismo, llamada reflejo de estiramiento estático, que persiste durante todo el tiempo que se mantenga el músculo en una longitud excesiva20.
Todo este proceso posibilita el mantenimiento de la postura y la colocación idónea del cuerpo o de sus segmentos para conseguir el control neuromuscular deseado. Ya hemos explicado que se trata de una sensación inconsciente, ya que estos receptores no producen una sensación de dolor, calor o frío12, 18, 22. Se proyectan a nivel de la médula espinal (reflejos monosinápticos) y el cerebelo18.
El segundo tipo de receptor muscular, los OTG, son estructuras encapsuladas que se disponen en serie a las fibras musculares extrafusales a nivel de su inserción en fascias y tendones26. Se localizan principalmente en la unión neuromuscular, donde las fibras de colágeno del tendón se fusionan con las fibras musculares extrafusales. Los receptores de Golgi situados en el músculo-tendón se diferencian de los que residen en la articulación ya que son sensibles principalmente a los cambios de tensión muscular18, 22. Cuando estos receptores se activan por una tensión muscular excesiva, conducen rápidamente señales para ocasionar una inhibición refleja de los músculos con los que conecta, es decir se produce una relajación del músculo25. Su función última es la de proteger a los músculos y su tejido conjuntivo de una carga excesiva26. De la misma forma que el huso neuromuscular, tienen una respuesta dinámica que se activa ante una tensión muscular súbita, a la que le sigue una respuesta estática de menor intensidad20. Estos receptores se proyectan a nivel de la médula espinal, el cerebelo y la corteza sensorial.
Tal y como hemos apuntado, parece ser que los receptores musculares son los principales determinantes del sentido de movimiento y posición de la articulación, y los receptores articulares y cutáneos podrían tener un rol más secundario18, 22.
Integración y procesamiento centralTodos los estímulos sensoriales mencionados anteriormente son integrados en los diferentes niveles del SNC para generar las respuestas motoras adecuadas. El control del movimiento y la postura del individuo dependerán del flujo continuo de información sensorial que existe a su alrededor12. Esta información es enviada vía aferente y procesada en lo que podemos llamar un eje central y 2 áreas de asociación. El eje central corresponde a los 3 niveles de control motor: la médula espinal, el tronco cerebral y la corteza cerebral. Por otro lado, las 2 áreas de asociación son el cerebelo y los ganglios basales, que son los responsables de la modulación y regulación de los mandos centrales. La posterior activación de las neuronas motoras puede darse en respuesta directa a la entrada sensorial periférica (reflejos), o bien ser dirigida de forma descendente desde el tronco del encéfalo o córtex cerebral21.
Las respuestas motoras, pues, se pueden ubicar en 3 niveles de control motor: el nivel espinal o reflejo monosináptico para las respuestas motoras simples, el tronco del encéfalo para la respuesta inmediata ante reflejos más complejos (automatismos), y la corteza cerebral o control voluntario para controlar los movimientos altamente complicados12.
Nivel de la médula espinalEste tipo de nivel de control motor se utiliza en circunstancias donde se exige una respuesta refleja a estímulos externos. Esta respuesta es altamente estereotipada y de acción rápida. Los reflejos pueden ser provocados a partir de la estimulación de los mecanorreceptores cutáneos, musculares y articulares, e implican la excitación de las motoneuronas alfa y gamma21. Uno de los ejemplos más conocidos de este tipo de reflejo es el de estiramiento.
Nivel del tronco encefálicoSe relaciona con respuestas intermedias y automáticas, pero no tan estereotipadas como el reflejo espinal. Contiene los principales circuitos que controlan el equilibrio postural y muchos de los movimientos estereotipados y automáticos del cuerpo humano21. Además de estar bajo mando cortical directo y de prestar una estación indirecta de transmisión entre la corteza y la médula espinal, las áreas del tronco cerebral regulan y modulan de forma directa las actividades motoras basadas en la integración de la información sensorial que proviene de la fuente visual, vestibular y somatosensorial12, 21.
Nivel de la corteza cerebralEs el nivel más alto de control motor, donde la información procedente de los diferentes sistemas sensitivos es decodificada y procesada por la conciencia cognitiva. Este hecho permite crear estrategias motoras complejas, lo que posibilita el conocido como movimiento voluntario.
Áreas asociadasAunque las 2 áreas de asociación, el cerebelo y los ganglios basales, no pueden iniciar de forma independiente la actividad motora, son indispensables para la continua regulación de la misma, lo que permite la ejecución coordinada de la respuesta motora12, 21.
Respuesta neuromuscularEn el apartado anterior se han descrito 3 tipos de respuesta motora en función de los diferentes niveles del SNC que intervienen. Esta respuesta está estrechamente relacionada con el concepto de control del sistema neuromuscular y, por tanto, de la estabilidad dinámica de la articulación. El control neuromuscular es un término utilizado frecuentemente en muchas disciplinas para referirse al control motor. Este es referido a todos aquellos aspectos que envuelven el control del sistema nervioso en la activación muscular y a los factores que contribuyen al rendimiento de las tareas motrices27.
Lephart y Fu (2000) interpretan el control neuromuscular como la respuesta eferente inconsciente a una señal aferente que tiene como objetivo conseguir la estabilidad dinámica de la articulación12. Por otra parte, Williams et al. (2001) definen el control neuromuscular como la capacidad para producir un movimiento controlado mediante una actividad muscular coordinada, lo que resulta de una compleja interacción entre el sistema nervioso y el sistema musculoesquelético22.
Tomando como referencia estos autores, definimos el control neuromuscular como la activación muscular precisa que posibilita el desarrollo coordinado y eficaz de una acción. Es importante hablar de las diferentes estrategias de control neuromuscular para llevar a cabo una acción coordinada y eficaz, tal y como hacemos a continuación.
Coordinación intramuscularUno de los principales factores neurales que afectan a la fuerza es la coordinación intramuscular de un mismo músculo. Este hecho implica varios mecanismos de control. Entre ellos, se encuentran: el reclutamiento espacial (aumento del número de unidades motoras reclutadas), el reclutamiento temporal (aumento de la frecuencia de impulsos de unidades motoras) y la sincronización de las diferentes unidades motoras para producir una contracción voluntaria máxima28, 29.
Coordinación intermuscularLa literatura actual describe principalmente 2 principios neuromusculares sobre la programación de la intervención muscular en un movimiento30: 1) coactivación de agonistas y antagonistas y (2) activación recíproca de agonistas y antagonistas.
Solomonow y Krogsgaard (2001) definieron la coactivación como una actividad de alta intensidad de la musculatura agonista de forma simultánea a una actividad de baja intensidad de la musculatura antagonista de una misma articulación18, aunque debemos tener en cuenta que estos niveles de activación de que hablan pueden no tener siempre esta proporción, pues dependerá del tipo de tarea realizada. La coactivación es utilizada sobre todo cuando se realizan acciones nuevas y/o balísticas, cuando la velocidad de ejecución aumenta, y cuando se necesita dar estabilidad para mantener una posición articular constante30. El grupo de Ford et al. (2008) concluye en su revisión sistemática que la coactivación antagonística de la musculatura isquiosural es evidente durante las acciones dinámicas en cadena cinética cerrada31. El mantenimiento de esta posición de coactivación se convierte en un patrón de estabilización articular, que provoca una reducción de la carga que pueden sufrir las estructuras ligamentosas y articulares18, 30. Por el contrario, la existencia de una coactivación no deseada provoca una disminución de la velocidad de ejecución, un mayor gasto energético y, paralelamente, una disminución del rendimiento.
En cuanto a la activación recíproca a la que se refiere Lloyd (2001), viene dada por el principio neuromuscular de inhibición recíproca, la cual consiste en la inhibición de un músculo para facilitar la contracción de su antagonista20. Esta estrategia es utilizada preferentemente en muchos movimientos poliarticulares automatizados, como por ejemplo levantarse de una silla o durante la marcha30.
Existe una relación compleja entre estos 2 mecanismos de control neuromuscular para garantizar la eficiencia del movimiento y la estabilidad articular31. Actualmente sabemos que las estrategias neuromusculares son modificables con el entrenamiento15, 32. De esta manera, cuando se aprenden nuevos movimientos, la tarea se realiza en primer lugar con elevados niveles de coactivación, y es a medida que se realiza un aprendizaje cuando hay una progresión hacia la activación recíproca30. Es decir, en las acciones producidas en el deporte tenemos que llegar a un equilibrio entre la coactivación, que da estabilidad y protección a la articulación, y la activación recíproca, la cual puede aumentar la eficiencia muscular de la acción deportiva.
Aparte de las estrategias mencionadas, es importante resaltar que el control dinámico de la articulación viene influido por 2 mecanismos de control motor, llamados en lengua anglosajona feedback (retroalimentación, vía refleja) y feedforward (preactivación)31, 33. El control feedback se refiere a la respuesta dada vía refleja por un estímulo sensorial. Por otra parte, los mecanismos de control feedforward son descritos como las acciones de anticipación que ocurren antes de la detección sensorial de una disrupción de la homeostasis y que se basan en experiencias anteriores. Por un lado, el retraso electromecánico, que es inherente al mecanismo feedback, puede limitar la eficacia de la protección articular proporcionada por la musculatura implicada. Por el contrario, sí son adecuados para el mantenimiento de la postura y movimientos más lentos. Por otra parte, el mecanismo de preactivación involucra una preparación mediante la anticipación de la carga o el movimiento. Esta preparación puede ser aprendida y ajustada a las diferentes acciones que se presenten mediante la acumulación de experiencias motrices. A medida que un deportista adquiere más experiencia, los modelos de coactivación inapropiados van desapareciendo y son sustituidos por patrones musculares más coordinados para el desarrollo de una buena estabilidad dinámica articular y un movimiento eficaz, ya que para que una acción pueda resultar óptima ha de cumplir estos 2 aspectos31. Aunque actualmente no existe evidencia que ratifique la explicación desarrollada, la cual es extraída de los autores comentados, esta teoría sobre la evolución del control motor según la experiencia motriz tiene aspectos bien fundamentados.
Control posturalDentro de este apartado, es importante definir el control postural, el cual depende de la capacidad del individuo de controlar el sistema neuromuscular. Este implica el dominio de la posición del cuerpo en el espacio con los objetivos de estabilidad y orientación. La estabilidad postural, también llamada equilibrio, se define como la capacidad para mantener el centro de gravedad corporal dentro de la base de sustentación. Por otro lado, la orientación postural se refiere a la habilidad de mantener una correcta relación entre los propios segmentos del cuerpo y entre estos y el entorno a la hora de realizar una tarea8, 9. Por último, dentro de este apartado, es necesario tener presente que el mantenimiento de este control postural viene dado por 3 fuentes de información sensorial12: el feedback somatosensorial de los receptores periféricos, la visión y el sistema vestibular.
Conclusiones y aplicaciones prácticasEl perfecto funcionamiento del sistema sensoriomotor será básico para el control de los diferentes niveles de respuesta motora, así como para ejecutar de forma coordinada y eficaz las diferentes tareas motrices desarrolladas en las actividades deportivas. El sistema sensoriomotor no puede entenderse como la simple entrada y salida de estímulos, sino que se trata de un complejo sistema formado por las vías aferentes, de procesamiento e integración de la información, y las respuestas eferentes, lo que permitirá mantener la homeostasis articular durante tareas motrices más exigentes.
Es básico tener en cuenta las diferentes estrategias de control neuromuscular (coordinación intramuscular e intermuscular) para llevar a cabo una acción coordinada y eficaz, así como la regulación de la rapidez de las respuestas en función del nivel de control y procesamiento de la información por el SNC. En relación con lo anterior, será importantísimo equilibrar los principios neuromusculares de coactivación de los agonistas y antagonistas y la activación recíproca para asegurar el máximo rendimiento con la mayor protección articular posible. Aparte de las estrategias mencionadas, debemos resaltar los mecanismos de retroalimentación y anticipación para asegurar el control neuromuscular óptimo durante las acciones deportivas.
La comprensión del funcionamiento de este sistema nos da las bases para poder planificar los entrenamientos neuromusculares más adecuados y de esta forma asegurar la estabilidad funcional de las articulaciones durante actividades como cambios de dirección o recepciones de salto, relacionadas con una alta incidencia lesiva. Este sistema no solo es importante trabajarlo en el ámbito de la prevención y el tratamiento de lesiones, sino también para la mejora del rendimiento deportivo.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
Recibido 22 Junio 2012
Aceptado 25 Septiembre 2012
Autor para correspondencia. azaharafort@gmail.com

